Imagine a swarm of insect-sized robots capable of recording criminals for the authorities undetected or searching for survivors caught in the ruins of unstable buildings. Researchers worldwide have been quietly working toward this but have been unable to power these miniature machines — until now.
Engineers from MIT have developed powerful micro-drones that can zip around with bug-like agility, which could eventually perform these tasks. Their paper in the journal Advanced Materials describes a new form of synthetic muscle (known as an actuator) that converts energy sources into motion to power these devices and enable them to move around. Their new fabrication technique produces artificial muscles, which dramatically extend the lifespan of the microbot while increasing its performance and the amount it can carry.
In an interview with Tech Xplore, Dr. Kevin Chen, senior author of the paper, explained that they have big plans for this type of robot:
“Our group has a long-term vision of creating a swarm of insect-like robots that can perform complex tasks such as assisted pollination and collective search-and-rescue. Since three years ago, we have been working on developing aerial robots that are driven by muscle-like soft actuators.”
Soft artificial muscles contract like the real thing
Your run-of-the-mill drone uses rigid actuators to fly as these can supply more voltage or power to make them move, but robots on this miniature scale couldn’t carry such a heavy power supply. So-called ‘soft’ actuators are a far better solution as they’re far lighter than their rigid counterparts.
In their previous research, the team engineered microbots that could perform acrobatic movements mid-air and quickly recover after colliding with objects. But despite these promising results, the soft actuators underpinning these systems required more electricity than could be supplied, meaning an external power supply had to be used to propel the devices.
“To fly without wires, the soft actuator needs to operate at a lower voltage,” Chen explained. “Therefore, the main goal of our recent study was to reduce the operating voltage.”
In this case, the device would need a soft actuator with a large surface area to produce enough power. However, it would also need to be lightweight so a micromachine could lift it.
To achieve this, the group elected for soft dielectric elastomer actuators (DEAs) made from layers of a flexible, rubber-like solid known as an elastomer whose polymer chains are held together by relatively weak bonds – permitting it to stretch under stress.
The DEAs used in the study consists of a long piece of elastomer that is only 10 micrometers thick (roughly the same diameter as a red blood cell) sandwiched between a pair of electrodes. These, in turn, are wound into a 20-layered ‘tootsie roll’ to expand the surface area and create a ‘power-dense’ muscle that deforms when a current is applied, similar to how human and animal muscles contract. In this case, the contraction causes the microbot’s wings to flap rapidly.
A microbot that acts and senses like an insect

The result is an artificial muscle that forms the compact body of a robust microrobot that can carry nearly three times its weight (despite weighing less than one-quarter of a penny). Most notably, it can operate with 75% lower voltage than other versions while carrying 80% more payload.
They also demonstrated a 20-second hovering flight, which Chen says is the longest recorded by a sub-gram robot with the actuator still working smoothly after 2 million cycles – far outpacing the lifespan of other models.
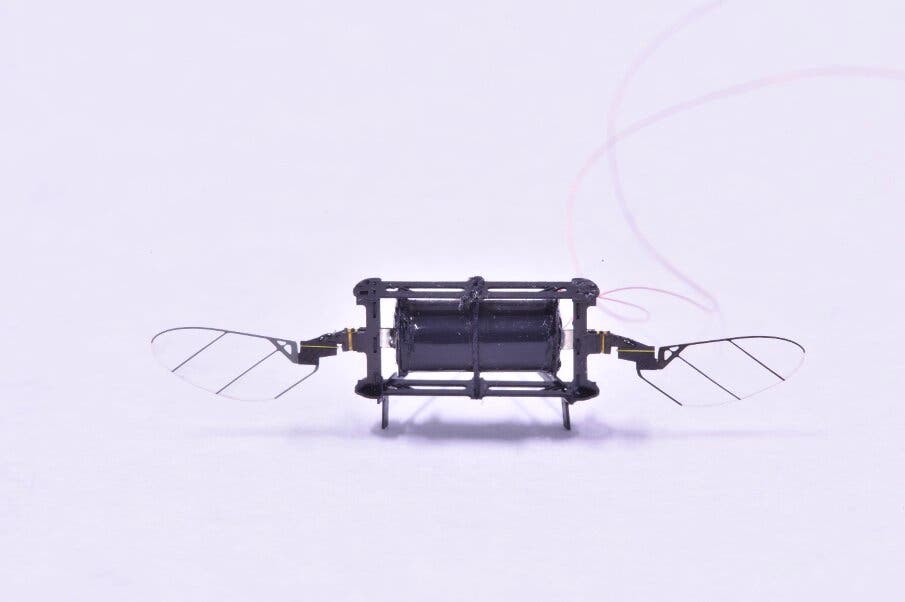
“This small actuator oscillates 400 times every second, and its motion drives a pair of flapping wings, which generate lift force and allow the robot to fly,” Chen said. “Compared to other small flying robots, our soft robot has the unique advantage of being robust and agile. It can collide with obstacles during flight and recover and it can make a 360 degree turn within 0.16 seconds.”
The DEA-based design introduced by the team could soon pave the way for microbots that work using untethered batteries. For example, it could inspire the creation of functional robots that blend into our environment and everyday lives, including those that mimic dragonflies or hummingbirds.
The researchers add:
“We further demonstrated open-loop takeoff, passively stable ascending flight, and closed-loop hovering flights in these robots. Not only are they resilient against collisions with nearby obstacles, they can also sense these impact events. This work shows soft robots can be agile, robust, and controllable, which are important for developing next generation of soft robots for diverse applications such as environmental exploration and manipulation.”
And while they’re thrilled about producing workable flying microbots, they hope to reduce the DEA thickness to only 1 micrometer, which would open the door to many more applications for these insect-sized robots.
Source: MIT


