A team of scientists at the North Carolina State University has created soft robots capable of harvesting thermal energy from the environment. These robots can autonomously navigate tricky roads and other complex settings such as mazes and deserts.
Unlike traditional robots that are constructed using rigid and hard substances like aluminum, steel, or plastic, a soft robot is built from electroactive polymers, fluids, fiber, shape memory alloys (materials that change their shape on cooling), and other kinds of flexible materials that have mechanical properties similar to that of living tissues. The soft robots developed at NC State University are made of external stimuli-responsive liquid crystal elastomers (LCE), a material that deforms in response to light or heat and produces motion.
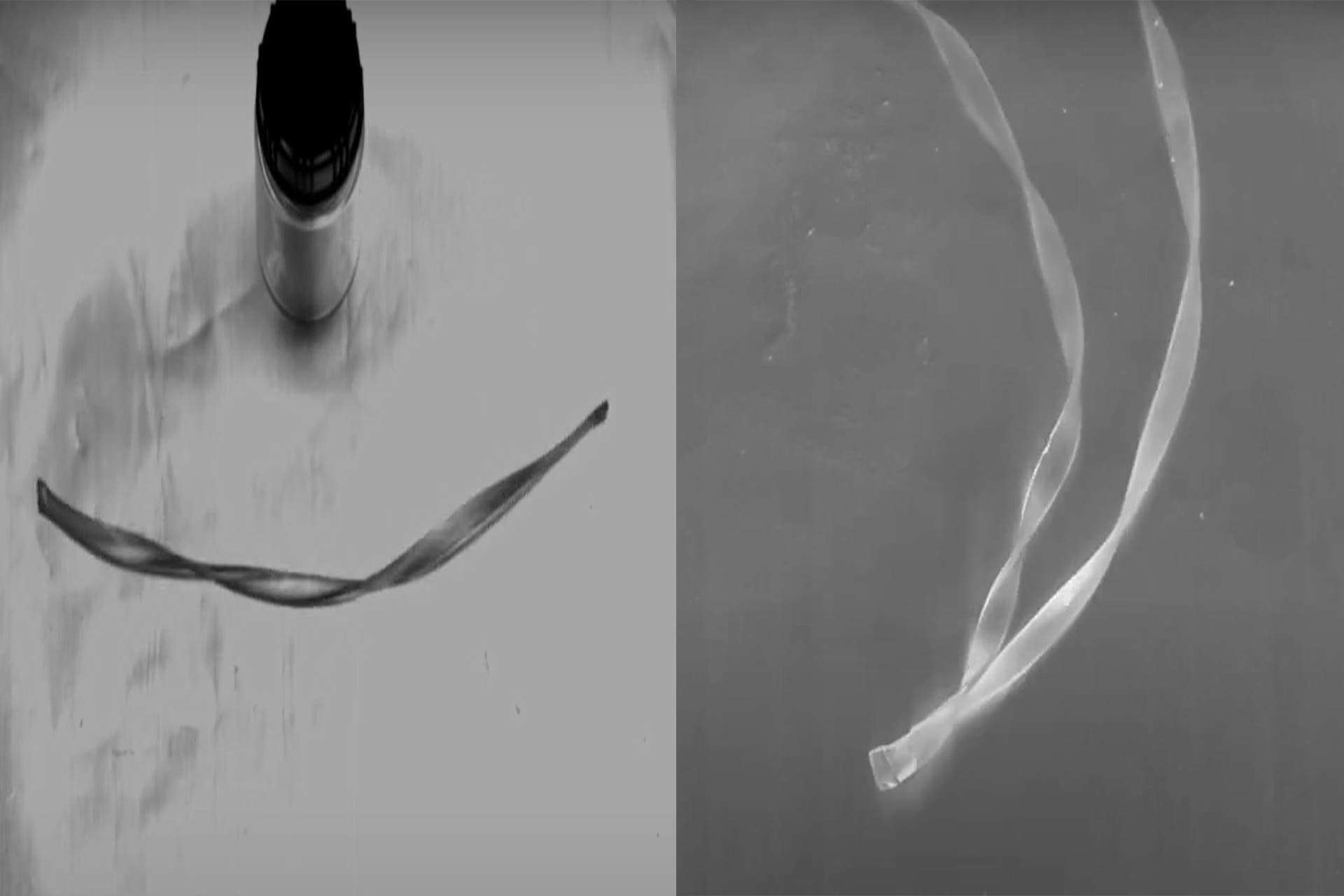
So for instance, when placed on a hot surface such as a car roof in the middle of the desert, the soft LCE robots start rolling automatically because of the heat-induced shrinking and untwisting of their elastic bodies. Interestingly, no human or computer intervention is required to achieve the self-rolling motion in these twisted ribbon-shaped robots.
Understanding the soft robot movement under high temperatures
According to the researchers, the LCE soft robots operate using physical intelligence instead of a neuron-based computational unit like a brain. Physical intelligence involves the use of structural designs and smart materials to physically encode functions such as sensing, actuation, control, adaption, and decision-making, into the body of an agent.
While explaining the concept of physical intelligence, Jie Yin, corresponding author and associate professor at NC State told ZME Science:
“These soft robots demonstrate a concept called ‘physical intelligence,’ meaning that structural design and smart materials are what allow the soft robot to navigate various situations, as opposed to computational intelligence. One example of physical intelligence is the Venus flytrap, which does not need a “brain” to compute and control its rapid closing and opening. When the flies touch the sensors of the leaf, they can quickly snap to close it to catch flies. Thus, it can enable autonomous sensory and actuation functions.”
During their experiments, the researchers placed the soft robots on a hot surface above 55 degrees Celsius (131 degrees Fahrenheit). The part of the robot’s twisted body that came in contact with the surface contracted whereas the segments that didn’t touch the surface remained the same. This resulted in the form of rolling motion and as the researchers increased the surface temperature, the speed of the rolling bot also increased.
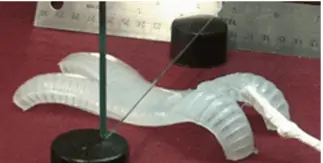
The researchers had previously performed a similar experiment with smooth-sided rod-shaped robots but when those robots came across hurdles in their path, they failed to roll and started spinning in one place. The ribbon-shaped robots managed to continue their rolling motion even after facing obstacles, without any human or machine intervention. When an object was brought near the ends of the robot, the robot rotated around it. When an obstacle was placed near the mid part of the robot, it snapped. However, the robot didn’t stop there, it snapped multiple times until it managed to get in a position from where it could go beyond the obstacle.
“The two actions, rotating and snapping, that allow the robot to negotiate obstacles operate on a gradient. The most powerful snap occurs if an object touches the center of the ribbon. But the ribbon will still snap if an object touches the ribbon away from the center, it’s just less powerful. And the further you are from the center, the less pronounced the snap until you reach the last fifth of the ribbon’s length, which does not produce a snap at all,” said Yao Zhao, the first author of the study.
The power, potential, and limitations of soft robots
The scientists at NC State performed multiple experiments with their soft robots in different complex settings. The twisted robots successfully navigated maze-like paths and desert conditions.
“The applications will be open-end surveillance and environmental monitoring in a widely distributed area in hot and harsh environments. For example in hot deserts, by harvesting the thermal energy from the hot sand for powering its motion, when integrated with different wireless sensors, it could provide the ground information such as humidity, temperature, and others. Another application could be in outer space, e.g., on the moon with its daytime temperature over 120 degrees Celsius,” Professor Jey Yin said.

Moreover, the soft robots could also be used for conducting search and rescue operations in complex and hot regions. However, these robots would require autonomy and intelligence before they are employed for large-scale object manipulations, rescue, and environmental monitoring activities. Professor Jey Yin highlights that achieving autonomy and intelligence in soft robots in a controllable way is very tricky.
Currently, most of the power, sensory, and control units applied to robots are rigid but they are not suitable for soft robots. The integration of self-powering, sensing, control, computation, and decision-making into soft robots requires the development of efficient soft technologies. The researchers hopes that physical intelligence can make this possible, it could emerge as a “new paradigm to simplify the designs and controls” in soft robots.
The study highlighting the navigation capabilities of the discussed soft robots is published in the journal PNAS.





{kind=link}