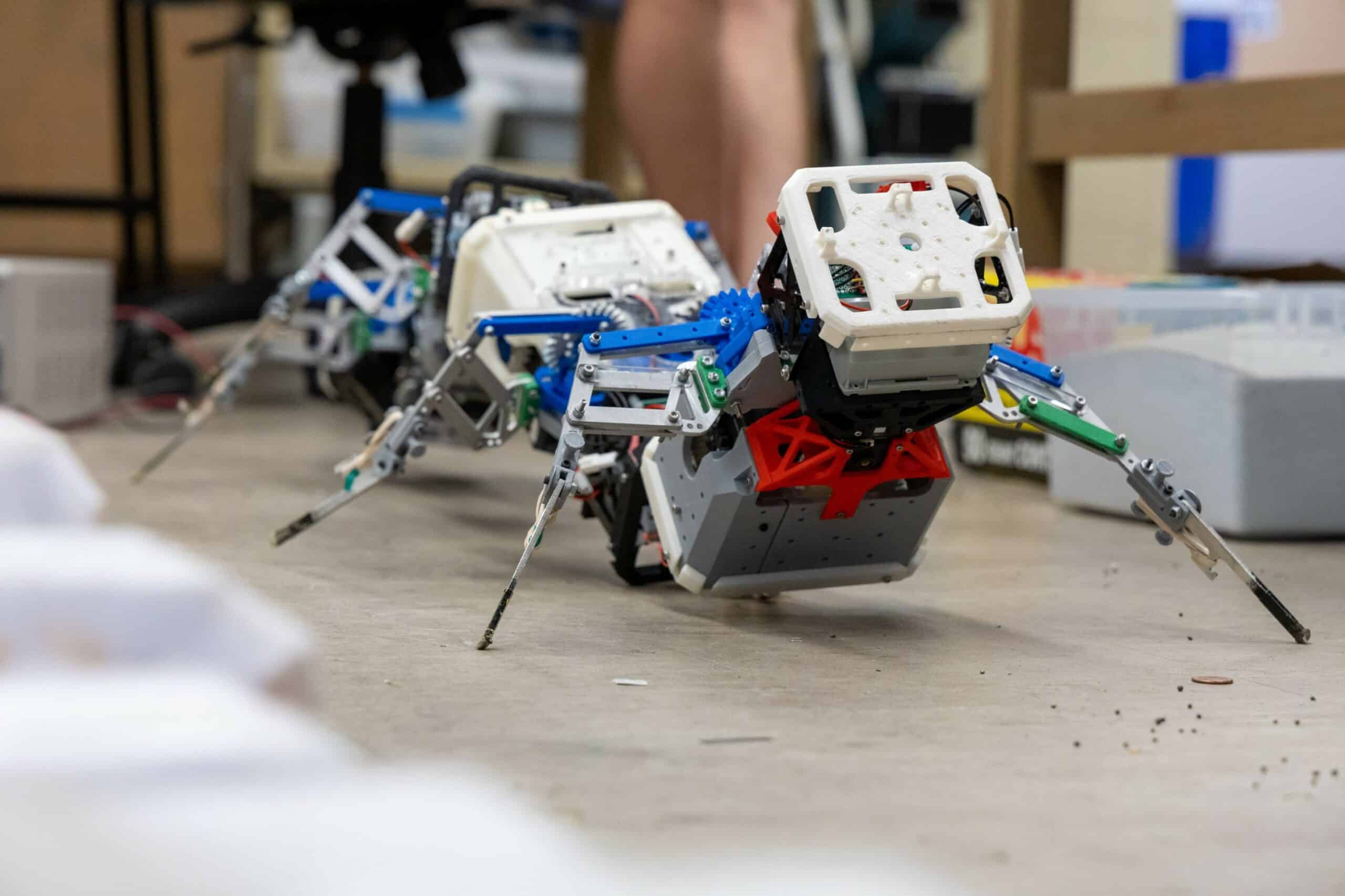
A team of researchers from the Georgia Institute of Technology in the US created a number of robots inspired by the centipede. Each robot has a different number of legs to see which worked best on difficult surfaces. They could one day be used to bring help to areas affected by disasters such as earthquakes.
Centipedes are primitive arthropods, relatives of insects. Their name literally means “a hundred legs”, and indeed some of them have nearly 100 legs. They are identified by their long and segmented body, with each segment having one pair of legs. Centipedes are predators and feed on any small crawling organisms that they can catch. They’re also quite able to navigate specific environments.
While human movement is dominated by inertia, that’s not the case for centipedes, Daniel Goldman, one of the researchers behind the robots, explained in a statement. “If they stop wiggling their body parts and limbs, they basically stop moving instantly, Goleman said. “They inhabit a world that is very different from our world of movement.”
Centipede-inspired robots
Goldman and a team of physicists, engineers, and mathematicians wanted to know if the many limbs of a centipede could be helpful for locomotion. They created a new theory of multilegged locomotion and manufactured a set of robotic models, which could move across uneven surfaces without any extra sensing or control technology.
They were inspired by Claude Shannon, a mathematician, who came up with a theory that demonstrates how to reliably transmit signals over distance. The theory suggests that one way to ensure that a message gets from point A to point B on a noisy line isn’t to send it as an analog signal, but instead to break it into discrete digital units.
In the same vein, adding more legs and breaking the distance that has to be covered in smaller units (for more legs) seemed like a good idea.
The researchers proposed that adding leg pairs to the robot could increase its ability to move robustly over challenging surfaces, a concept they call spatial redundancy. If one leg falters, the abundance of legs keeps it moving anyway. In effect, the robot then becomes a very reliable system to transport itself from A to B on difficult landscapes.
“With an advanced bipedal robot, many sensors are typically required to control it in real time,” Baxi Chong, a member of the team, said in a statement. “But in applications such as search and rescue, exploring Mars, or even micro robots, there is a need to drive a robot with limited sensing. There are many reasons for such sensor-free initiative.”
To test this, the researchers created terrains to mimic an inconsistent natural environment. They then tested the robot by adding more legs two each time, starting with six and expanding to 16. As the leg count increased, the robot could move more agilely across the terrain. Eventually, they tested the robot on real terrain and the results were the same.
The team is already applying its discoveries to farming. Goldman created a company that wants to use the robots to weed farmland where weed killers are ineffective. In the meantime, they are also working on refining the robot. They want to determine the optimal number of legs in a way that is cost-effective but retains the benefits.
“In this paper, we asked, ‘How do you predict the minimum number of legs to achieve such tasks?’” Chong said. “Currently we only prove that the minimum number exists, but we don’t know the exact number of legs needed. Further, we need to better understand the tradeoff between energy, speed, power, and robustness in such a complex system.”
The study was published in the journal Science.

